
Gene Mereweather
Philip Oasis
Alice Fuller
Rodrigo Menezes
Group #6
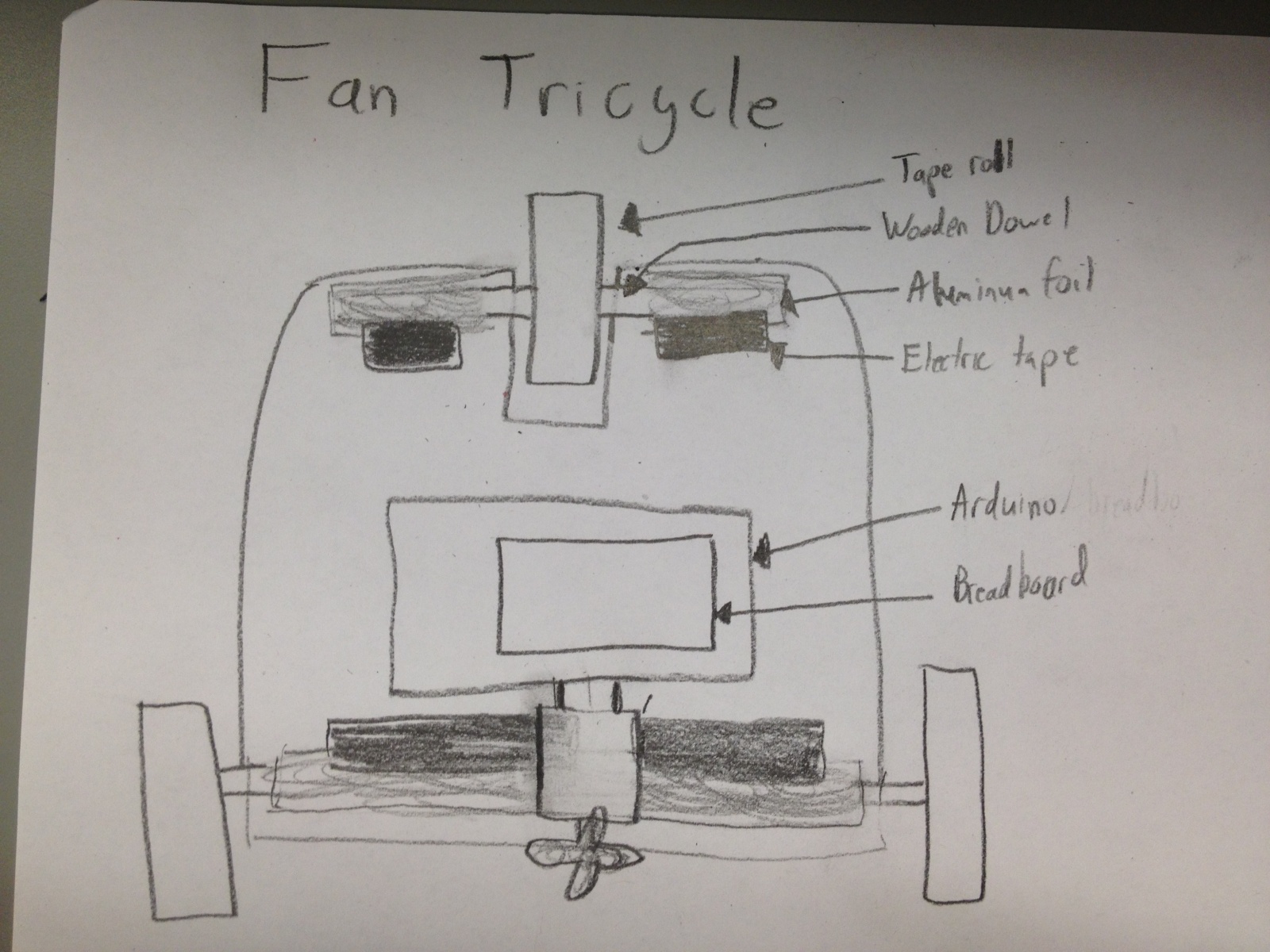
We built a tricycle that used three rolls of tape as wheels and wooden dowels as axles. One DC motors powered a cardboard fan that pushed the tricycle. We consider the prototype a success, but it definitely is not the most efficient mode of transportation! We tried to keep the tricycle as compact as possible, as weight played a very large part in its motion.
Brainstormed Ideas
- Continuous treads (like a tank!). Use rolls of aluminum foil for wheels and aluminum foil as the treads.
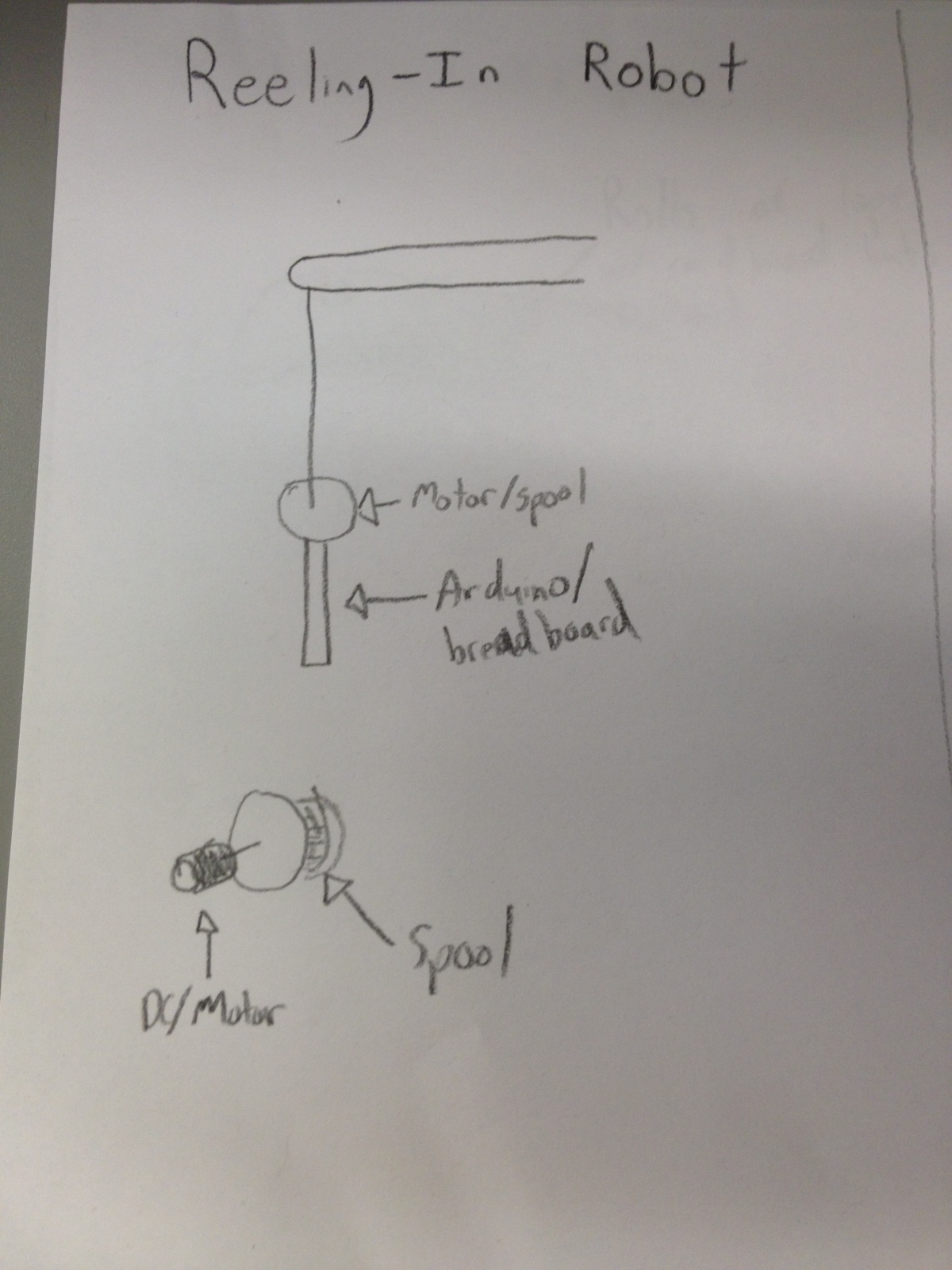
- Reeling-in robot with thread attached to motor and other end fixed
- Balls instead of wheels – allows for more directions (makes parallel parking a breeze!). Servo motors can change the direction of the DC motors.
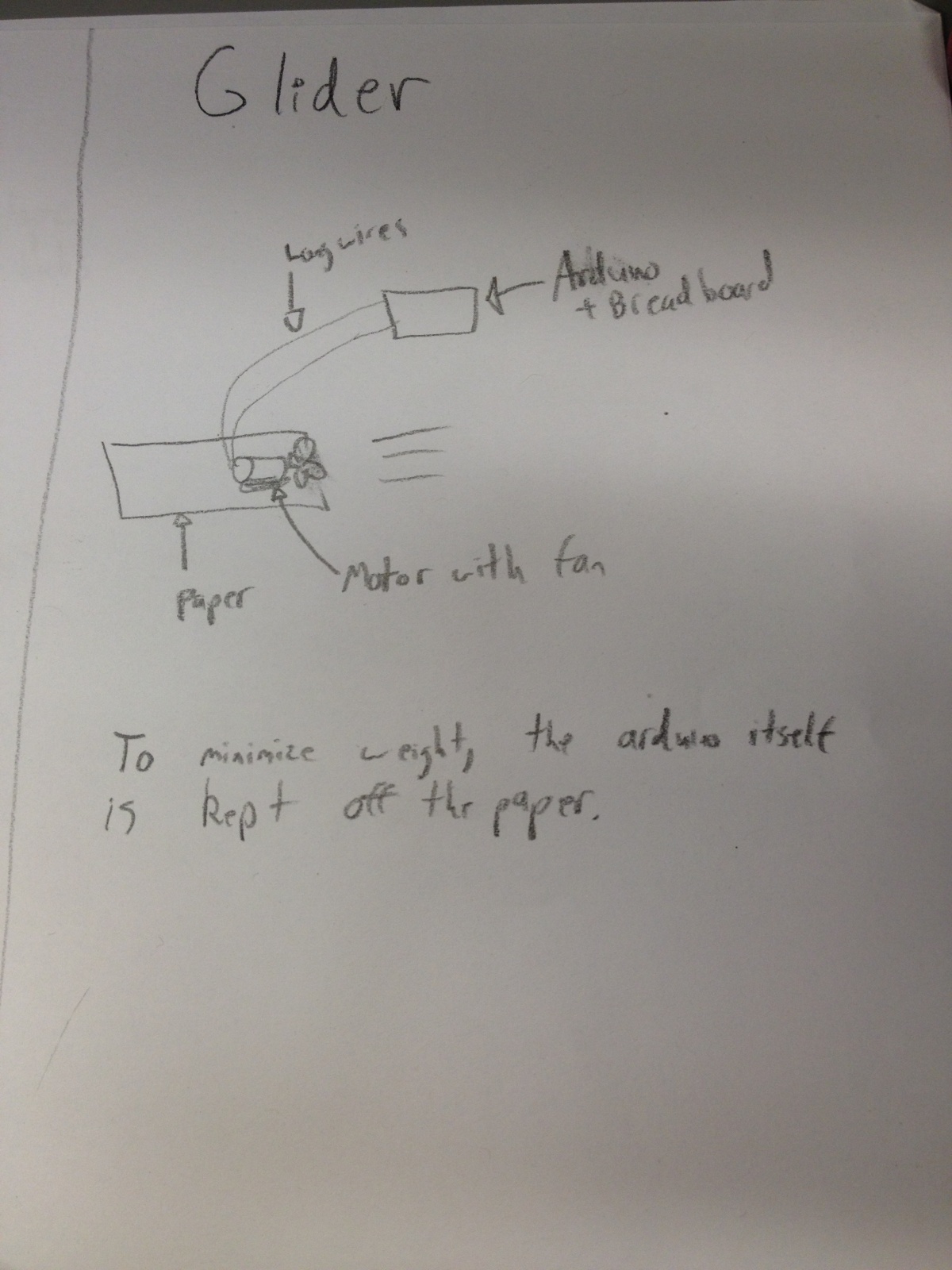
- Hover car – fans on the bottom for hovering and fan on the top for direction
- Use two servo’s with wooden extensions to act as legs, with another “leg” trailing behind to keep it balanced
- Put an off-center weight on the DC motor, then set the whole assembly on top of angled toothbrush heads
- Use one servo to scoot the robot forward, and a DC motor for rotary
- Use the servo motor to change direction in the front two wheels and the DC motor for acceleration in the back two wheels.
- “parachuter” attach piece of cloth to catch wind, then use two servos to tug on the cloth so as to change motion
- Attach a magnet to the servo arm, secure another large magnet to the floor, and change the servo angle to attract or repel that other magnet
- have a little stone attached to a string. The servo will “throw” the ball out, the DC motor which has the string attached to it will pull on it to pull itself forward (the rock would have to be heavy enough)
- There will be two servos acting as breaks/balancers they will both lift up briefly then the DC motor which will be in the back will engage and move the robot forward, then the servos will lower to the ground to balance the robot again while the DC is stopped.
- Put it on wheels, but have a DC motor to power a fan.
- Attach three wheels that are on unpowered axels, have the robot moved forward by a fan that is attached to the back and is connected to a dc motor.
- Place a motor on top of a piece of metal and have it move at as fast a speed as possible so as to heat up the small piece of metal. Have a fan at the back. Place to whole thing over a piece of wax or ice. The thin hot metal will melt the wax and the flan will propel it forward. To change the direction you could place the dc fan on top of a structure that is attached to a servo.
Design sketches
Parts
– 3 rolls of tape of roughly the same diameter
– Cardboard, cut into hubs for the wheels, a base for the car and for the fan
– Wooden dowels for axles
– Aluminum foil, to hold the axles in place
– Tape, to keep everything together
– Arduino, breadboard and wires
– 1 DC motors
– 1 330 Ohm resistors
– 1 1N4001 diode Diodes, 1 PN2222 transistor
Instructions
– Cut out the cardboards so you have sturdy hubs for the wheels of tape and so you have a comfortable base for your tricycle.
– Fit the cardboard into the tape rolls and use the wooden dowels as axels. Tape aluminum foil to the base so that the axles can still rotate within the foil, but still keep the base up.
– Choose the smallest breadboard possible (to conserve weight), and use the diode/transistor/resistor to connect the DC motors to the fan on the base.
– Secure the arduino and breadboard on the base with tape.
– Turn on the robot and watch it move (slowly)
Video
In the final version, we ended up separating the breadboard from the rest of the car to make it lighter.
Source
We used Adafruit’s default DC motor code:
/*
Adafruit Arduino - Lesson 13. DC Motor
*/
int motorPin = 3;
void setup()
{
pinMode(motorPin, OUTPUT);
Serial.begin(9600);
while (! Serial);
Serial.println("Speed 0 to 255");
}
void loop()
{
if (Serial.available())
{
int speed = Serial.parseInt();
if (speed >= 0 && speed <= 255)
{
analogWrite(motorPin, speed);
}
}
}