
Group Number and Name
Team X – Group 10
Group Members
- Osman Khwaja (okhwaja)
- Junjun Chen (junjunc)
- Igor Zabukovec (iz)
- (av)
Description of System
We built a crawler that propels itself forward by “punting”. We were inspired by punt boats which are propelled by a punter pushing against the bottom of a shallow riverbed with a long pole. Our system works by having the crawler push against the surface of the table with a short pole (attached to a servo motor), sliding itself forward as a result. The crawler does not actually move in the direction that we expected to when we made it, and problem we had is that there was no way to do the equivalent of lifting the pole out of the water in order to bring it back to the initial position. However, these two problems combined resulted in a crawler that worked differently from how we first intended, but nevertheless managed to scuttle forward fairly effectively. To improve this, we might try mounting the servo motor on a wheeled cart, which would help its movement be more consistent with our intention.
Brainstorming
- Ballerina – DC motor that spins a pencil wearing something similar to a dress
- Rocking Chair – Uses servo motor to rotate between end positions, just like a rocking chair
- Unicycle – wheel surrounds a DC motor and the wheel rotates as the DC motor does
- Yarn Ball Retracer – DC motor spins up along a string and moves eventually until all the string is wound up again
- Waddle Walker – Uses the servo motor to awkwardly waddle/walk in a semi-straight line by alternating leg movements
- Log roller – DC motor attached to a log=shaped object that is connected to the spinning axle of the motor
- Reversed roller – DC motor spins a gear which is connected to an object that moves along the ground. The direction of rotation of the DC motor is reversed due to the gear connection, and the object rolls in the reverse direction
- Hamster Ball – A DC motor is attached to a wheel (or small ball) inside a ball (the wheel is not connected to the ball, but pushes it).
- Wheelbarrow – A DC motor moves the front wheels of the vehicle, but it only moves if something is holding up the back.
- Lurcher – A two legged robot, one leg is static and being dragged by the other, which takes steps using a servo motor.
- Propellor Robot: a robot on wheels that moves by using a propellor attached to the back that blows it along.
- Punt: We attach an punting pole to a servo motor, and have it in a wheeled cart. The motor pushes the pole into the ground periodically, pushing itself forward.
Sketches
Circuit Sketch (taken from Arduino tutorial on Servo Motors):

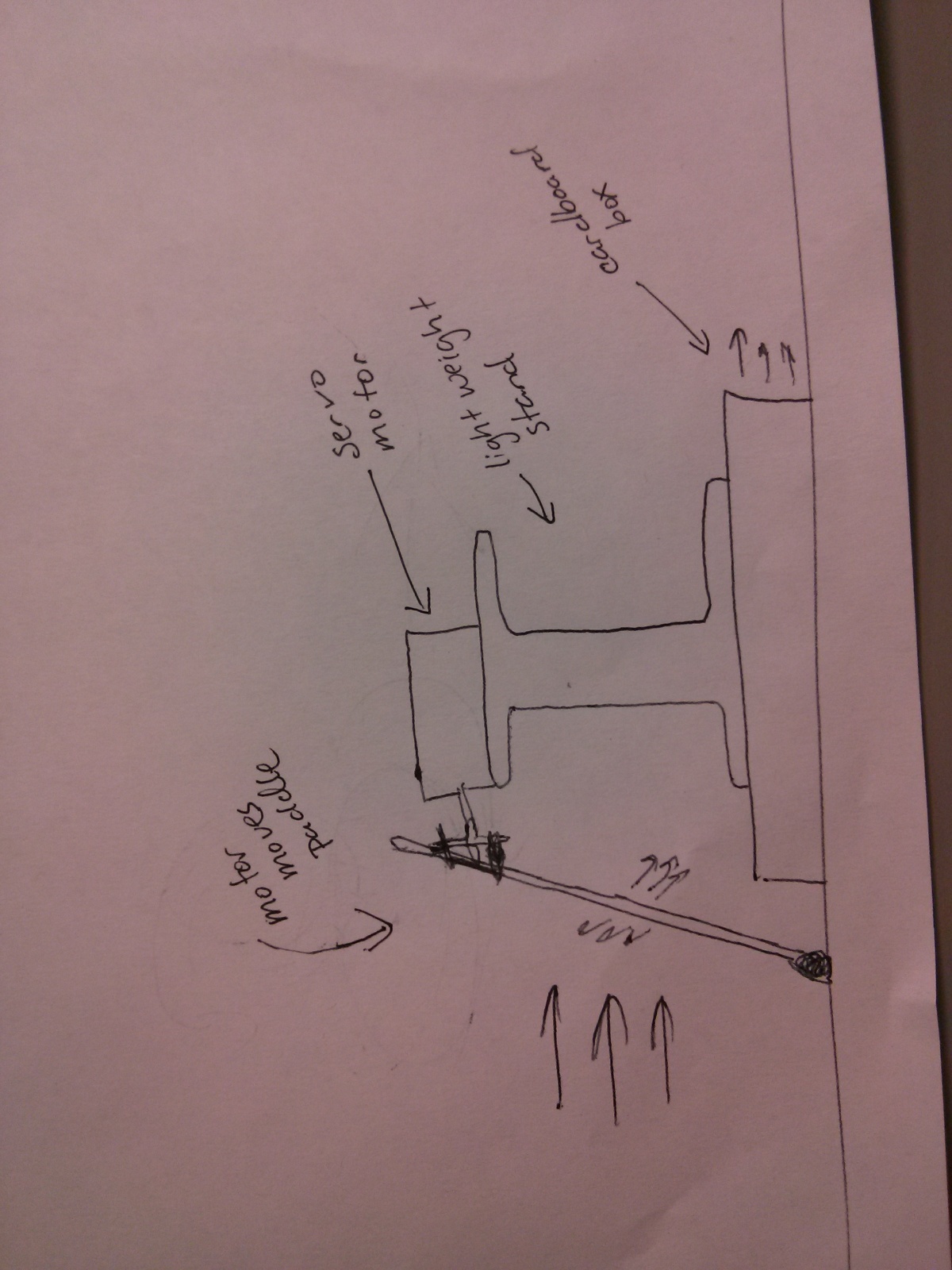
Crawler Sketch:
Demonstration Video
Parts Used
- Servo motor
- Arduino
- Cardboard Arduino box
- Empty spool (to raise servo motor)
- Straws (for punting pole)
- Electrical tape
- Jumper wires
Instructions
- Tape the empty spool vertically onto the empty Arduino uno box.
- Tape the servo motor horizontally on top of the spool
- Fashion an oar out of some small sticks by taping them together. At one end of the oar (the base), create a round end with electric tape
- Tape the oar to the rotating part of the servo motor such that the oar will hit the ground during rotation. Attach the oar such that it provides forward locomotion by angling it away from the box.
- Connect the servo motor to the breadboard and the arduino as shown in the picture from the adafruit learning system tutorial
- Connect the arduino to power and let it propel forward
Source Code
#include <Servo.h>
int potPin = 0;
int servoPin = 9;
Servo servo;
int angle = 0;
void setup()
{
servo.attach(servoPin);
}
void loop()
{
angle++; // 0 to 180-ish
servo.write(angle);
}