
Names: Abbi Ward, Dillon Reisman, Prerna Ramachandra, Sam Payne
Group Number: 9
Description
For this lab we built a robot with four legs that pulls itself along a string. Its four legs are the tips of ballpoint pens, allowing for a smooth gliding motion on relatively frictionless surfaces. Our original inspiration for the robot came from an idea we had to build a robot that opened and closed window shades according to how much light was in a room. This robot would move vertically rather than horizontally, doing so by using a motor to pull itself up a string. We decided to test this method of locomotion horizontally first. We were very pleased with the success of our robot- we did not imagine that it would move so well over the table surface, and in future iterations of this robot we could have it do interesting things in how it moves. The ballpoint pen tips were extremely useful tools for motion along a surface. Unfortunately we do not think the method we used to collect the string once the robot pulled it worked well (we simply wind it up on the end of the motor), and in future iterations we think that the robot should have a way of going one direction on the string, then reversing the motor and going the other direction. In total, however, we think that this method of motion could have many applications.
Brainstormed Ideas:
- Helicopter using paper/cardboard blades
- Vibrating robot, moves by vibration
- Robot on wheels which uses a fan to propel itself
- Arms which rotate similar to single blade propellers to promote movement
- Three-legged omnidirectional single plane robot
- Worm robot, uses a single joint to contract and move forward
- Robot that hits the ground hard enough to “jump” forward
- Move the motor foward and reverse direction to hit limbs against ground and propel forward
- Use servo to wiggle from side to side and move forward
- Robot which eats tape/line of string to move forward
- Robot which dances to a beat
- High five Robot – moves up to you and gives you a high five if you bring your hand close to it
- Acrobat robot – does flips at regular intervals as it moves around in a circle
We chose to prototype Idea 10, a robot which eats a line of string to move forward.
Design Sketches
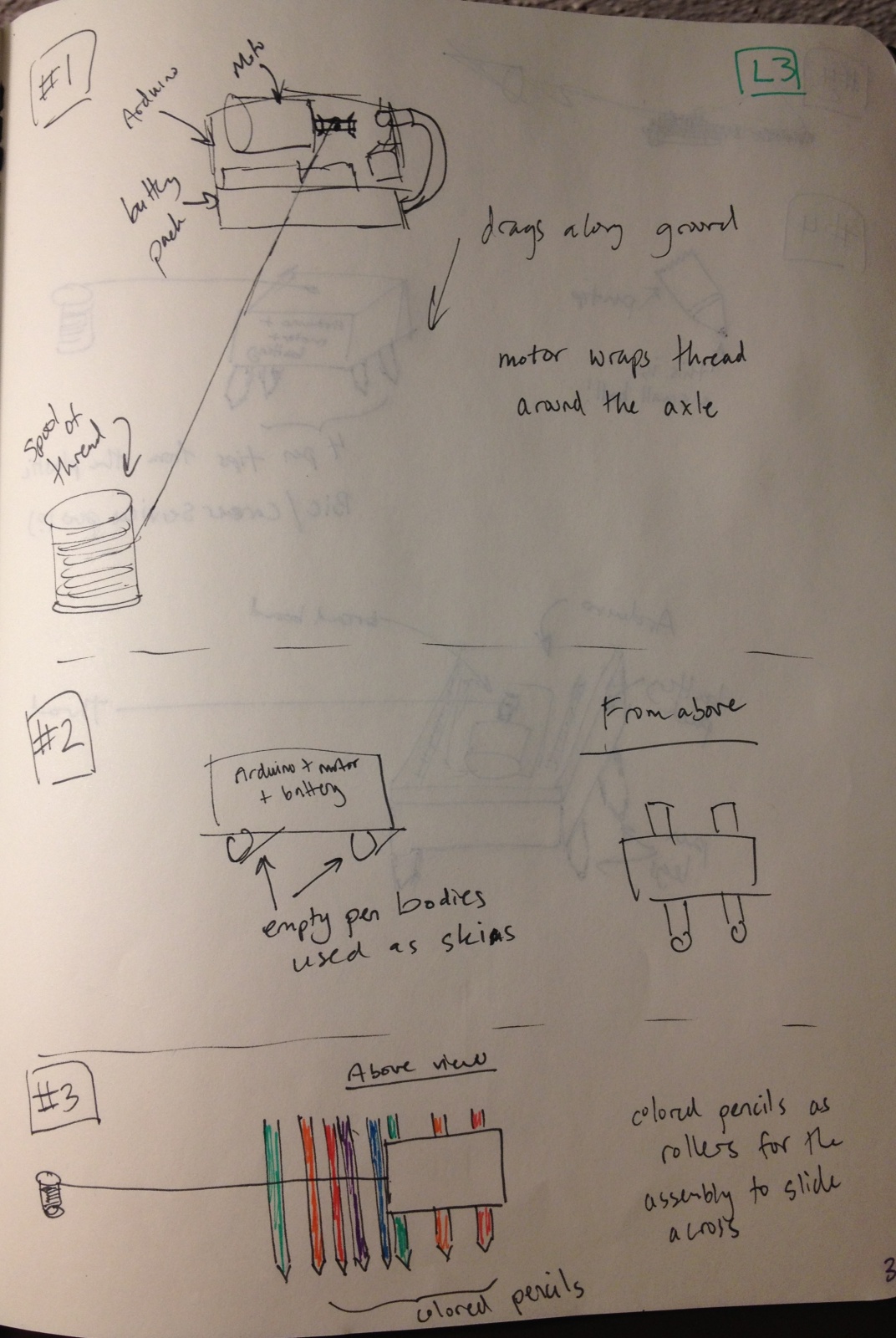
Assembling the robot, use of the string and using pencils to reduce friction
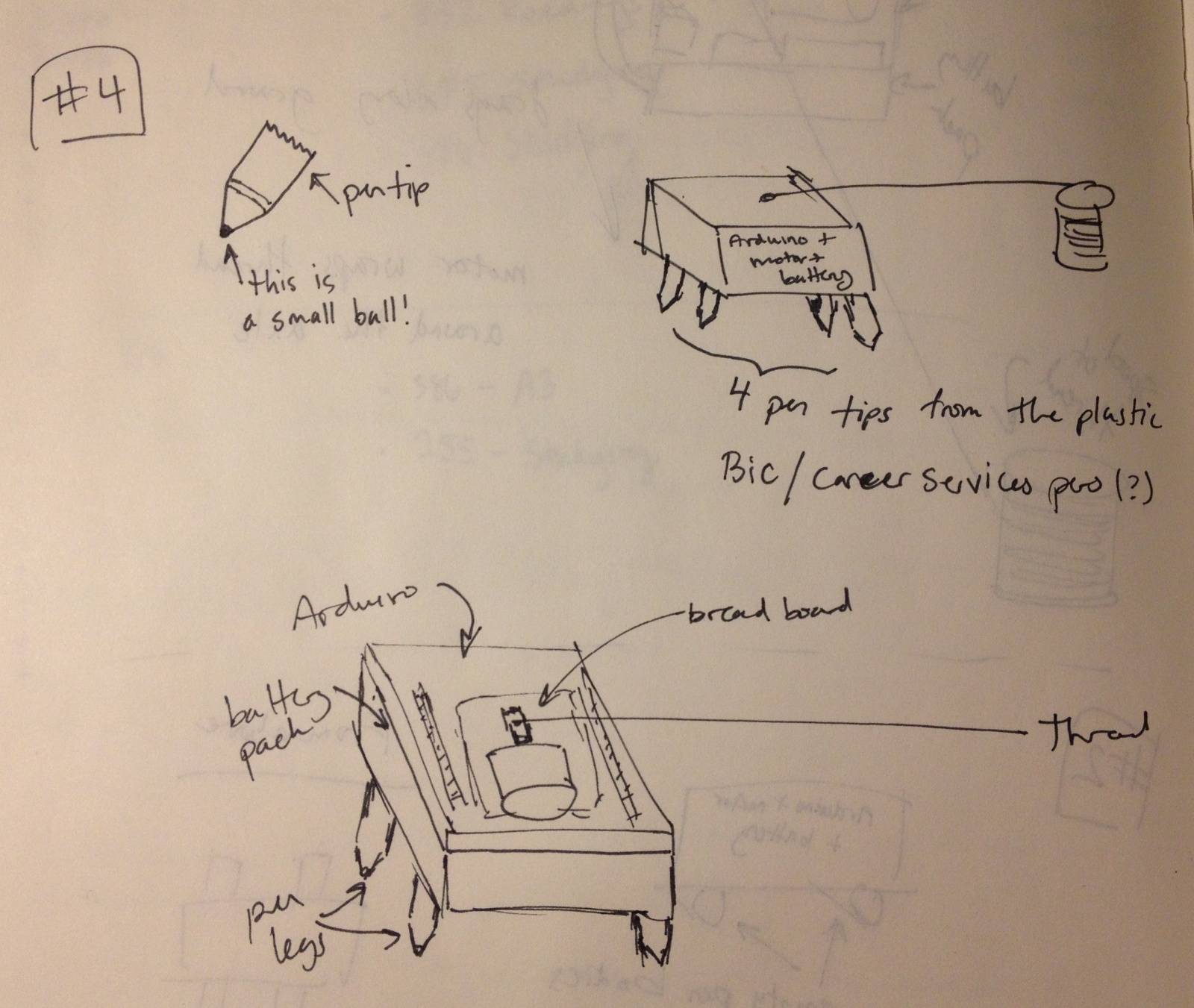
Using only pencil tips to minimize ground friction, instead of rolling pencils
Demo of our System
Parts list
- Arduino
- motor
- PN2222A transistor
- Diode (1N4001)
- electrical tape
- 4 disposable ballpoint pens (plastic)
- breadboard
- 330 ohm
- battery pack to power the Arduino
Instructions to Recreate System
- Build the schematic on the breadboard
-
Attach the motor to the breadboard with electrical tape
-
Break open one of the disposable pens into the following parts
-
the outer tube
-
inner tube (holds the ink)
-
tip
-
ink
-
-
Cut off about a 1/2 inch of the inner tube that doesn’t have any ink
-
Use thinly sliced strips of electrical tape to make ridges on the edges of the tube. This will be used to help keep the thread on the axle so that the robot pulls itself and the thread will not rub against the base of the motor.
-
Push this tube+tape combo onto the axle of the motor so that it fits snugly.
-
If leads are showing on the bottom/sides of the battery pack, put electrical tape over them so that loose wires don’t accidentally short power and ground.
-
Tape the Arduino to the battery pack (the batteries should face the floor)
-
Cut up the outer tube into ~1 inch pieces and place them on the Arduino.
-
Tape the breadboard+motor on top of the pen pieces such that the axle of the motor is centered on the robot.
-
On each of the four pens, take off the tips (with the ink cartridge removed) and tape them to the side/bottom of the battery pack such that the assembly balances and can slide easily across the floor or table.
-
Use a small piece of electrical tape to attach the thread piece
-
Hold the spool, upload the code, and the robot will traverse towards the spool
Source Code for the Robot
/* Names: Dillon R, Prerna R, Sam P, Abbi W Group 9, Varpex COS 436 S2013
Our robot code.
This was just for walking across the table.
*/
int motorPin = 3;
void setup()
{
pinMode(motorPin, OUTPUT);
}
void loop()
{
int motorspeed = 254;
//walk a little bit
analogWrite(motorPin, motorspeed);
delay(3000);
// stop
analogWrite(motorPin,0);
while(1);
}